

什么是稳态误差?
稳态误差定义为当时间趋于无穷时(即控制系统的响应达到稳态时)系统输出的期望值与实际值的差值。
稳态误差是线性系统输入/输出响应的一个特性。一般来说,一个好的控制系统应该具有较低的稳态误差。
首先,我们将通过分析一阶传递函数的稳态误差来讨论它稳态响应。让我们考虑传递函数如下:

这是一个简单的一阶传递函数,增益为1,时间常数为0。7秒。注意,它被称为一阶传递函数,因为分母中的“s”具有“1”的最高次幂。如果是这样的话 ,它将是一个二阶传递函数。
,它将是一个二阶传递函数。
该传递函数与稳态输入的响应如图1所示。可以看出,在稳态,输出正常等于输入。因此,稳态误差为零。

这个函数对一个单元斜坡输入的响应如图-2所示。可以看出,在稳态时,输入和输出是不同的。因此,对于一个单位斜坡输入,一个稳态误差存在。
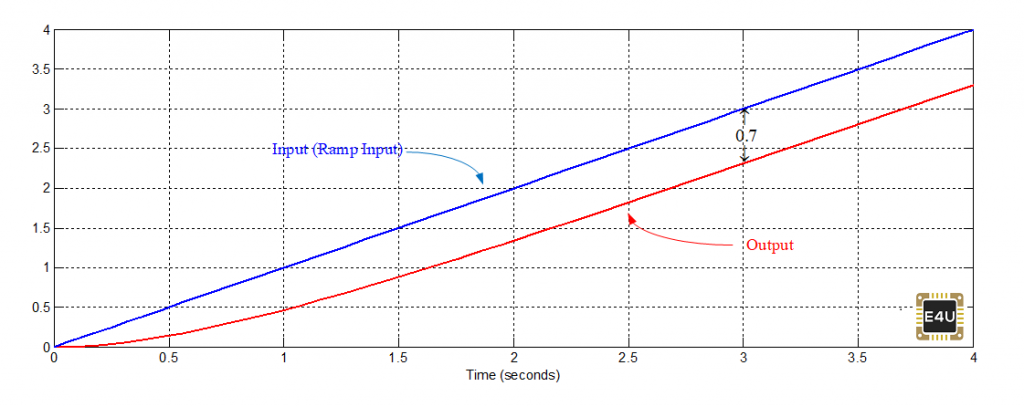
请注意,在许多控制系统书籍中,您可以发现逆斜坡输入,一阶传输函数的稳态误差等于时间常数。从上面观察到图2,我们可以看到这是真的。在T = 3秒时,输入为3,而输出为2.3。因此,稳态误差为0.7,其等于该一级传输函数的时间常数。
请注意以下重要提示:
- 稳态误差在抛物线输入时最高,在斜坡输入时通常较低,在阶跃输入时甚至更低。如上所述,对于阶跃输入,稳态误差为零,对于斜坡输入为0.7,可以发现对于抛物线输入,稳态误差是∞。
- 需要注意的是稳态误差依赖于输入,而稳定性不依赖于输入。
我们考虑一个具有传递函数的闭环控制系统

符号有它们通常的意义。系统的稳定性取决于分母,即' 1+G(s)H(s) '。' 1+G(s)H(s) = 0 '称为特征方程。它的根表示系统的稳定性。稳态误差取决于R(s)。
在闭环控制系统中,误差信号可以计算为 稳态误差为e党卫军=
稳态误差为e党卫军= ,其中稳态误差为稳态误差信号的值。由此我们可以看出稳态误差依赖于R(s)。
,其中稳态误差为稳态误差信号的值。由此我们可以看出稳态误差依赖于R(s)。
- 如上所述,稳定性取决于分母I.1 + G(S)。这里'1'是恒定的,因此稳定性取决于g(s),这是可以改变的等式的一部分。所以,你可以了解波德图,奈奎斯特图在g(s)h(s)的帮助下被绘制,但它们表示稳定性
 。
。 - G(s)H(s)称为开环传递函数和
称为闭环传递函数。通过对开环传递函数G(s)H(s)的分析,通过波德图和奈奎斯特图可以得到闭环传递函数的稳定性。
 。
。稳态误差示例
单位步骤输入的稳态误差
现在,我们将在闭环控制系统中解释,稳态误差,数值示例少。我们将从具有单位步进输入的控制系统开始。
示例1:
考虑如图-3所示的控制系统(system-1):

参考输入的R年代'是单位阶跃输入。
System-1的各种稳态值如图-4所示。

可以看出,误差信号的稳态值为0.5,因此稳态误差为0.5。如果系统是稳定的,并且各种信号是常量,则可以如下获得各种稳态值:
在转移函数中 ,得到传递函数的稳态增益。
,得到传递函数的稳态增益。
您可以计算输出如下:

记住这一点 =单位步长输入=
=单位步长输入= ,我们可以重新排列它:
,我们可以重新排列它:

输出的稳态值是:

我们可以使用上述方法来计算任何信号的稳态值。例如:
输入是 (输入是单位步骤输入)
(输入是单位步骤输入)
其稳态值= = 1。
= 1。
同样,误差信号可以计算为:

误差信号的稳态值(即稳态错误)是:

从图-4可以看出,输入与输出的差值为0.5。因此稳态误差为0.5。
计算稳态误差的另一种方法涉及查找错误常量,如下所示:
计算位置误差系数kp= 你会找到Kpe = 1,党卫军=
你会找到Kpe = 1,党卫军= 。你会找到相同的答案。
。你会找到相同的答案。
如果输入是阶跃输入 (它是阶跃输入,但不是单位阶跃输入),则稳态误差为e党卫军=
(它是阶跃输入,但不是单位阶跃输入),则稳态误差为e党卫军=
如果输入是单位斜坡输入,则计算,速度误差系数kv= ,E.党卫军=
,E.党卫军=
若输入为单位抛物线输入,则计算,加速度误差系数Ka= ,E.党卫军=
,E.党卫军= 。
。
随着误差常量k的分析p,Kv和K.一个,就可以理解稳态误差是如何依赖于输入的。
PI控制器与稳态误差
PI控制器的优点是减小系统的稳态误差,而缺点是降低系统的稳定性。
PI控制器降低了稳定性。这意味着阻尼减小;PI控制器增加了峰值超调量和沉降时间;左侧特征方程的根(闭环传递函数的极点)将更接近虚轴。由于PI控制器的存在,系统阶次增大,稳定性降低。
考虑两个特征方程,一个是s3.+ S.2+ 3s+20=0,另一个是s2+ 3 s + 20 = 0。通过观察,我们可以告诉你,与第一个方程相关的系统的稳定性比第二个方程要低。你可以通过求方程的根来验证。你可以理解高阶特征方程的稳定性较低。
现在,我们将在System-1(图-3)中添加一个PI控制器(比例加积分控制器)并检查结果。在System-1中插入PI控制器后,图5中示出了各种稳态值,可以看出,输出正常等于参考输入。它是PI控制器的优点,即它最大限度地减少了稳态误差,使输出试图遵循参考输入。

图-5:从图中可以看出PI控制器的效果
PI控制器的传递函数可以计算为 或者
或者 可以提出一个问题,如果任何传递函数的输入为零,那么它的输出也应该为零。因此,在目前的情况下,PI控制器的输入为零,但PI控制器的输出是一个有限值(即1)。任何控制系统书籍中都没有给出这个解释,因此我们将在这里解释:
可以提出一个问题,如果任何传递函数的输入为零,那么它的输出也应该为零。因此,在目前的情况下,PI控制器的输入为零,但PI控制器的输出是一个有限值(即1)。任何控制系统书籍中都没有给出这个解释,因此我们将在这里解释:
(1)稳态误差不完全为零,它趋向于零,类似的' s '不等于零,它趋向于零,所以在任意情况下稳态误差为2x10-3,同时' s '(特别是PI控制器分母中的' s ')也等于2x10-3,因此PI控制器的输出为' 1 '。
让我们考虑另一个如图-6所示的控制系统:

图-6:使用PI控制器的闭环控制系统的例子
在这种情况下,我们可以说,在任何实例假设,稳态错误是2x10-3,同时's'等于4×10-3;因此,PI控制器的输出为“0.5”。这意味着两个'ESS'和's'往往趋于零,但它们的比例是有限的值。
在控制系统的书中,您永远不会找到s = 0或t =∞;你将永远找到
(2)第二种解释是稳态误差为零,' s '在稳态时也是零。PI控制器传递函数为 。在数学书中,你会发现
。在数学书中,你会发现 是未定义的,所以它可以是任何有限值(参见图-7)。
是未定义的,所以它可以是任何有限值(参见图-7)。

(3)第三种解释是,
是一个集成商。输入为零,零集成未定义。因此PI控制器的输出可以是任何有限值。
开环控制系统和闭环控制系统的一个基本差异
参考上述说明,我们将解释开环控制系统和闭环控制系统的一个基本差异。开环控制系统和闭环控制系统的差异,您可以在任何控制系统中找到*,但这里给出了与上述解释相关的一个基本差异,我们希望肯定会对读者有用。
开环控制系统可以表示如下:

闭环控制系统(反馈控制系统)可以表示如下:

植物的转移功能是固定的(植物的传递函数由于环境变化,干扰等)可以自动改变。在我们所有的讨论中,我们假设h(s)= 1;操作员可以控制控制器的传递函数(即控制器的参数,使得kp,Kd,K我) 等等。
控制器可以是比例控制器(P控制器),PI控制器,PD控制器,PID控制器、模糊逻辑控制器等。控制器有两个目标(i)保持稳定性,即阻尼应在0.7-0.9左右,峰值超调和稳定时间应较低(ii)稳态误差应最小(为零)。
但如果我们将尝试增加阻尼,那么稳态误差可能会增加。因此,设计控制器应该是这样(稳定和稳态误差)应该在控制范围内。控制器的最佳设计是一个庞大的研究主题。
PI控制器减小了稳态误差(e党卫军),但对稳定性有负面影响。
现在,我们将解释开环控制系统和闭环控制系统之间的一个基本区别,这与上述解释有关。
考虑图10;它是一个开环控制系统。

设输入为单位阶跃输入。因此,输入的稳态值是1。可以计算出输出的稳态值为“2”。假设由于任何原因,设备的传递函数[G(s)]发生了变化,对输入和输出的影响是什么?答案是,植物的输入不会改变,植物的输出会改变。
现在看看图11和12


两者都是闭环控制系统。在图-11中,假设由于任何原因,工厂的传递函数发生了变化,对输入和输出的影响是什么?在这种情况下,工厂的输入将改变,工厂的输出将保持不变。工厂的输出试图跟随参考输入。
图-12显示了植物参数发生变化的新情况。你可以看到植物的输入从0.5变成了0.476,而输出没有改变。在这两种情况下,PI控制器的输入为零,PI控制器的规格相同,但PI控制器的输出不同。
所以,你们可以理解,在开环控制系统中被控装置的输出改变,而在闭环控制系统中被控装置的输入改变。
在控制系统的书中,您可以找到以下语句:
“在植物传递函数的参数变化的情况下,与开环控制系统相比,闭环控制系统比较敏感”(即闭环控制系统输出的变化与开环控制系统相比较少)。
我们希望通过本文给出的例子可以使上述陈述更加清晰。
___________________________________________________________________
*亲爱的电气亚博ag安全有保障4U读者,请注意本文的目的不是重现本书中已有的主题;但我们的目标是以简单的语言向控制工程提供各种复杂的主题,具有数值例子。我们希望本文对您有所帮助了解稳态错误和PI控制器的各种复杂性。



")
