

通常在感应电动机相关的操作,鼠笼式感应电动机被广泛使用。推导了异步电动机的起动转矩方程
在那里,R2和X2转子是电阻和感应的吗电抗E2转子是否感应电动势和
N年代为同步定子磁链的RPS速度。在这个方程中,感应电动机的启动力矩为T上海与转子电阻R成正比2。
但问题是,由于鼠笼式感应电动机的转子电阻值很低,因此其启动转矩很低。因此,为了给鼠笼型异步电动机提供较高的转子电阻值,在异步电动机中采用了双棒双笼型转子。
其动机是为了提供更高的转子电阻值,从而使具有更高电阻值的转子提供更高的扭矩和更高的效率。
鼠笼式感应电动机为什么启动扭矩差?
的电阻不能改变鼠笼转子,因为它可以在滑环感应电动机。鼠笼式感应电动机转子的固定电阻很低。在起动时刻,转子中的感应电压与电源的频率相同。因此,起动电感电抗在静止状态下得到较高的值。转子电流的频率与静止时的供电频率相同。现在的情况是,转子感应电流虽然有较高的值,但滞后于感应电压的角度较大。因此,这将导致在静止状态下较差的启动扭矩。虽然感应电流是满载电流的5到7倍,但这个扭矩只有满载扭矩的1.5倍。因此,这种鼠笼单杆单笼转子不能适用于高负荷。我们应该去深条双笼感应电动机以获得更高的启动扭矩。
深筋双笼感应电机结构
在深筋双笼转子筋有两层。
外层有小截面的棒材。该外绕组具有较大的电阻。铁棒两端都剪短了。这样,磁链就小得多。因此电感很低。外鼠笼的抗性较高。抗电感电抗比高。
内层较有大截面钢筋。的电阻非常少。但是磁链非常高。这些铁条完全埋在铁里。由于磁链高,电感也很高。对电感电抗比的电阻较差。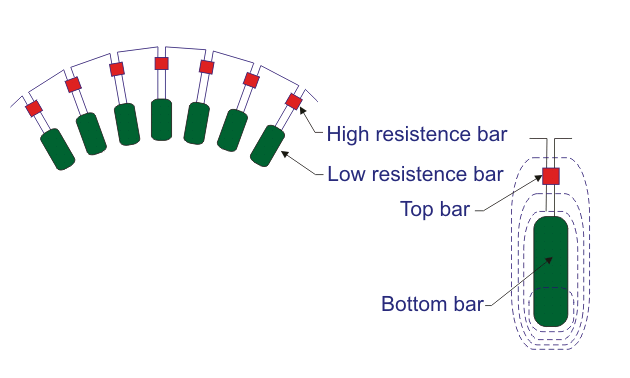
深棒双笼型感应电动机的结构
在静置条件下,内、外侧杆均有诱导产生电压电流与电源的频率相同。现在的情况是,电感电抗(Xl= 2πfL)由于交流量即电压和电压的趋净效应,在深筋或内侧筋提供更多当前的。因此,电流试图通过外部转子棒流动。
外转子电阻大,但感抗差。最终的电阻比单棒转子电阻稍高。转子电阻值越高,在起动时产生的转矩越大。当转子的转速深条双笼感应电动机增大时,转子内感应电动势的频率和电流逐渐减小。因此有电感电抗(Xl),电流面对的电感电抗和电阻整体较小。现在不需要更多的转矩,因为转子已经到达其全速运行转矩。
深转子IM的转速转矩特性
在那里,R2和X2分别为启动时的转子电阻和电感电抗,E2转子是否感应电动势和
N年代为同步定子磁链的RPS速度,S为转子转速的转差。从上述速度-转矩图可以看出,在静止状态下,阻力越大,转矩越大,而转差率越大,转矩越大。
单保持架和双保持架电机的比较
- 双笼型转子具有低启动电流和高启动转矩的特点。因此,更适合直接在线启动。
- 由于双笼型电机的有效转子电阻较高,因此与单笼型电机相比,双笼型电机在启动时转子发热较大。
- 外笼的高阻力增加了电阻双笼式电机。从而增加了满负荷铜损耗,降低了效率。
- 双保持架电机的拉出力矩小于单保持架电机。
- 在同等额定值下,双笼型电机比单笼型电机成本高20- 30%左右。




